Product overview
Description
The STSW-ETHDRV01V1 firmware package for the STEVAL-ETH001V1 servo drive solution, implements position control algorithm with real-time communication running on the STM32F767ZI microcontroller. It can manage connectivity, servo drive actuation and digital input/output interface at the same time.

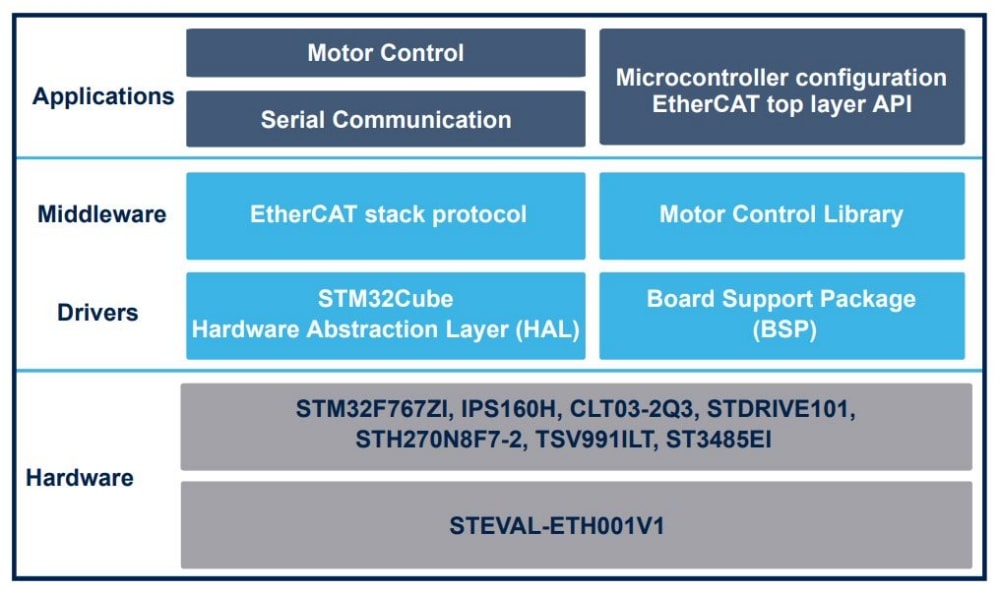
The connectivity includes real-time communication with EtherCAT protocol stack (V. 5.0.8) for the slave node and RS485 communication to interface the hardware with a PC or digital encoder supporting BiSS, EnDat and SSi protocols.
The servo drive actuation implements a position control algorithm using the X-CUBE-MCSDK motor control library to control a PMSM motor rotor position via EtherCAT communication remote control.
Digital actuation interface management is supported by a set of routines, able to manage the IPS160H digital output state according to the information received from the CLT03-2Q3 digital inputs and the command received from the PC through RS485 connection.
-
All features
- Position control algorithm based on X-CUBE-MCSDK
- Supported EtherCAT slave protocol (V.5.0.8)
- Firmware compliant with STM32Cube framework
- BSP support for digital actuation interface
- RS485 interface support