Product overview
Description
The STSW-GMBL02V1 firmware for the STEVAL-GMBL02V1 reference kit runs in the on-board STM32 microcontroller and is able to drive three motors in field-oriented control, to decode the three position sensor signals coming from the motors and implement an accurate position control algorithm regulating the camera orientation.

The firmware decodes simultaneously two different inertial measurement unit (Camera IMU and Frame IMU) to get the current orientation of the camera and of the frame where the board is mounted, respectively.
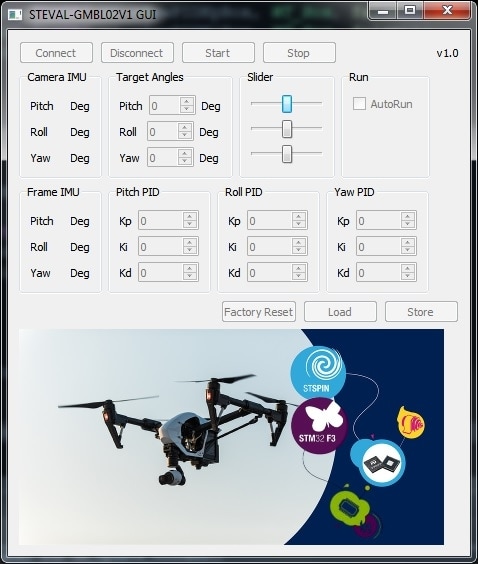
The STSW-GMBL02V1 GUI is able to communicate with the board via USB sending commands and getting feedbacks from the firmware. The GUI also reads the Camera and Frame IMU angle information, starts or stops the Gimbal control and changes the PID regulators for pitch, roll and yaw axes.
Any setting modified in the GUI can be then stored in the board EEPROM non-volatile memory. The GUI can program the auto-start feature to control the Gimbal, when the board is no more connected with the GUI, and restore the factory settings.
-
All features
- Firmware:
- firmware to drive three motors with field-oriented control (FOC)
- support for position sensors on three Gimbal motors (PWM inputs)
- accurate position control algorithm
- support for triple single shunt current sensing network
- decoding of on-board inertial measurement unit LSM6DSL (frame IMU)
- decoding of the external SPI inertial measurement units based on LSM6DSL on STEVAL-MKI178V1 or STEVAL-MKI178V2 board (for camera IMU)
- USB communication for real-time data exchange with the Gimbal GUI
- application data stored in the on-board 2 Kbit serial I2C bus EEPROM
- auto-start control when not connected to the GUI
- STSW-GMBL02V1 GUI
- start/stop Gimbal control
- real time setting of the PID regulators for pitch, roll and yaw
- set target angles for pitch, roll and yaw
- display measured camera and frame IMU angles
- save and load application data in flash
- restore factory settings
- Firmware: