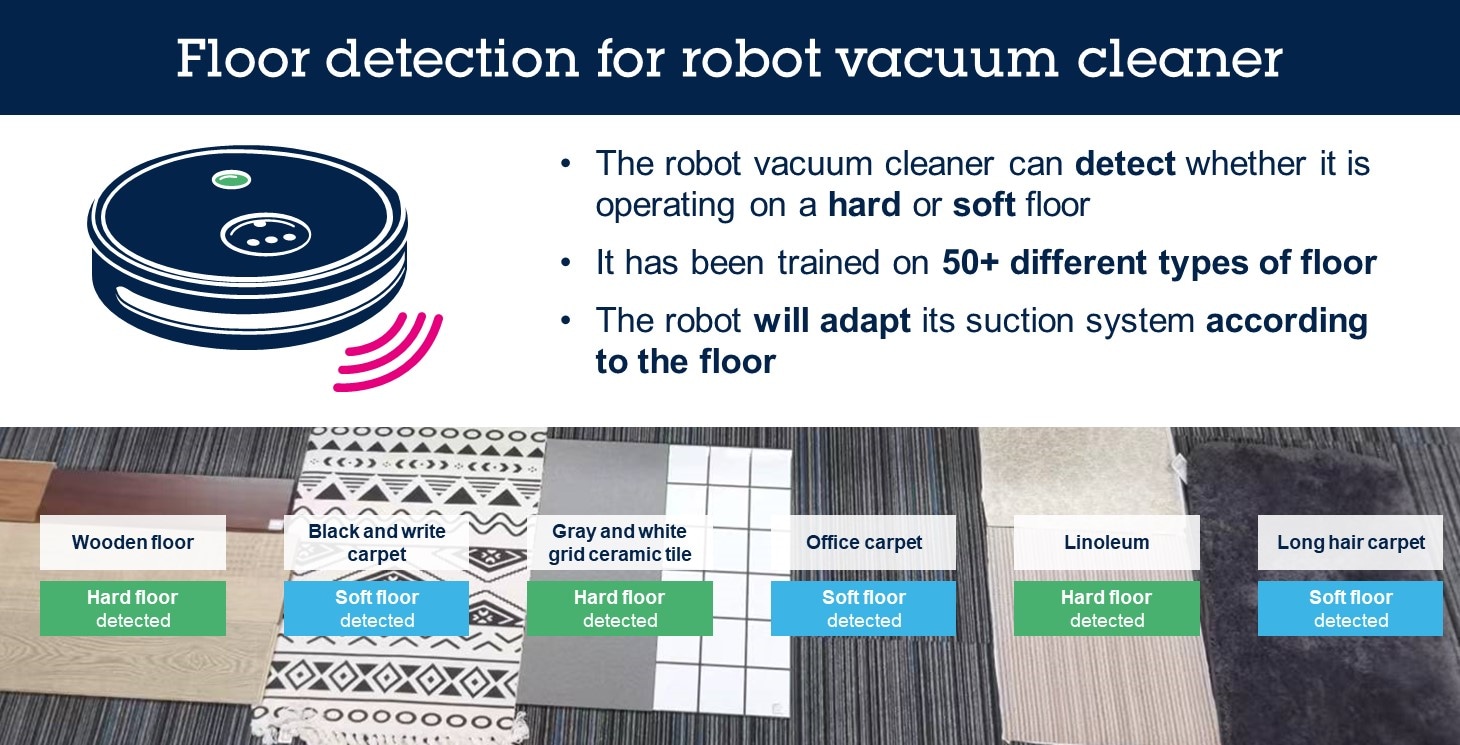
Floor type detection for vacuum cleaners
Advanced solution for material recognition of floor type (hard or soft) enabled by AI technology.

Approach
- In this project we used the signal data from the VL53L5 Time-of-Flight (ToF) sensor with 8 x 8 multi-zone detection, which was integrated in the front of a robot cleaner (4.5cm above the floor and 21.5 degrees tilted).
- Then, we created a collection of different types of material (including soft and hard floor materials) and trained the neural network (NN) model before pre-processing and post-processing the information to improve accuracy.
- Finally, we implemented the NN model into an MCU, using a NUCLEO-F401RE board, thanks to the STM32Cube.AI software package.
In comparison with standard programming, AI algorithms offer higher levels of accuracy and can easily adapt to special use cases.
Sensor
Data
Data format 8x8 range @15Hz
Results
Model Multilayer Perceptron (MLP)
Memory footprint:
68 Kbytes of flash memory for weights
1.6 Kbyteof RAM for activations
Accuracy: 96% on more than 50 pieces of material around 200,000 samples
Performance on STM32F401 @84MHz
Inference time: 7 ms
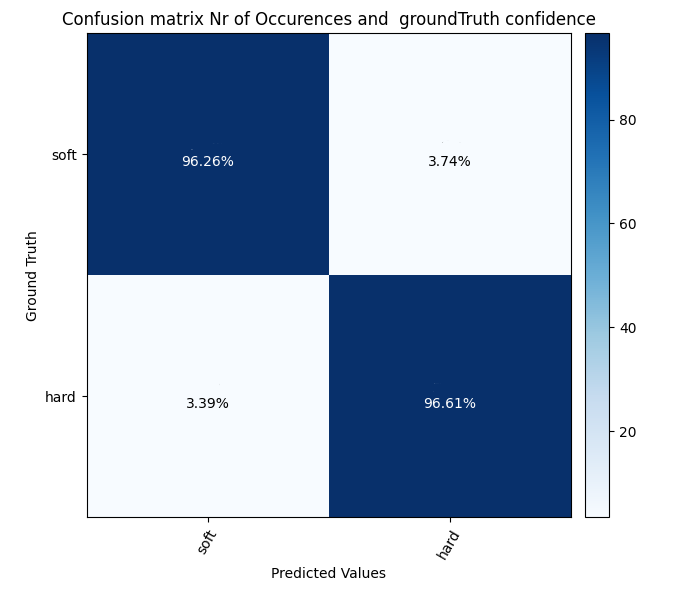
Confusion matrix


Resources
A free STM32Cube expansion package, X-CUBE-AI allows developers to convert pretrained AI algorithms automatically, such as neural network and machine learning models, into optimized C code for STM32.
The STM32 family of 32-bit microcontrollers based on the Arm Cortex®-M processor is designed to offer new degrees of freedom to MCU users. It offers products combining very high performance, real-time capabilities, digital signal processing, low-power / low-voltage operation, and connectivity, while maintaining full integration and ease of development.