MEMS Sensors Ecosystem for Machine Learning
The integration of artificial intelligence (AI) algorithms into MEMS sensors is transforming the way that we interact with the world around us. By embedding AI technology at the edge, today's sensors can collect, process, and send meaningful data in real time.
We enable the transition to in-sensor processing with a new generation of smart, open, and accurate sensors to help developers exploit their potential while improving overall system efficiency.
What makes our sensors unique?
- Smart sensors enable AI at the edge, reducing system data transfer volumes and offloading network processing for lower power consumption and a more sustainable solution
- An open ecosystem accelerates innovation and product development thanks to data sharing
- Accurate sensors bring meaningful information to the end users through the development of highly complex algorithms
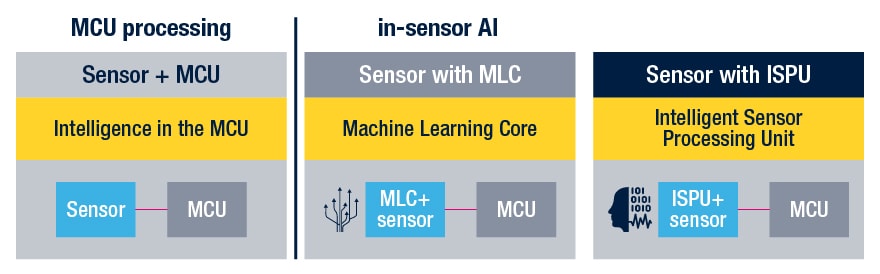
To ensure developers find the most effective solution in terms of computing capacity and flexibility in programming, ST offers a choice of several technologies for in-sensor processing: sensors with an embedded machine learning core (MLC) and sensors with an intelligent sensor processing unit (ISPU).
Sensors with an embedded machine learning core
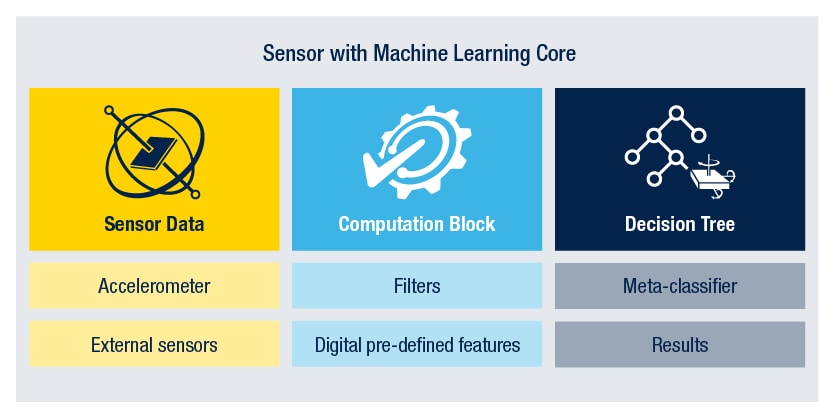
An MLC is an engine that can be trained to trigger an action when a specific event is detected using decision tree learning. With an MLC embedded in the sensor, it’s possible to recognize precise movements and communicate the event to a processor with the best possible system energy efficiency.
Added value:
- Extremely low-power solution
- Increased accuracy with better context detectability
- Offloads the main processor, improving system efficiency
MEMS sensors with an embedded MLC
Our third-generation of MEMS sensors with advanced machine learning core technology enables intuitive and context-aware functions for the latest battery-operated applications.
Accelerometers with an embedded MLC
| Part number | Application | MLC | Full scale | Temperature range | Power consumption | Application note for MLC features |
| LIS2DUX12 | Consumer | 128 nodes | ±16 g | -40°C to +85°C | 2.7 µA | AN5903 |
| LIS2DUXS12 | Consumer | 128 nodes | ±16 g | -40°C to +85°C | 2.7 µA | AN5901 |
| IIS2DULPX | Industrial | 128 nodes | ±16 g | -40°C to +105°C | 3 µA | AN6126 |
Inertial measurement units with an embedded MLC
| Part number | Application | MLC | Full scale | Temperature range | Power consumption | Application note for MLC features |
| LSM6DSV16X | Consumer | 128 nodes | ±4000 dps, ±16 g | -40°C to +85°C | 0.65 mA combo | AN5804 |
| LSM6DSV16BX | Consumer | 128 nodes | ±4000 dps, ±16 g | -40°C to +85°C | 0.95 mA combo | AN5892 |
| LSM6DSV32X | Consumer | 128 nodes | ±4000 dps, ±32 g | -40°C to +85°C | 0.65 mA combo | AN6071 |
| LSM6DSV80X | Consumer | 256 nodes | ±4000 dps, ±80 g | -40°C to +85°C | 0.8 mA combo | AN6288 |
| LSM6DSV320X | Consumer | 256 nodes | ±4000 dps, ±320 g | -40°C to +85°C | 0.8 mA combo | AN6292 |
| ASM330LHBG1 | Automotive | 512 nodes | ±4000 dps, ±16 g | -40°C to +125°C | 0.8 mA combo | AN6068 |
| ASM330LHHXG1 | Automotive | 512 nodes | ±4000 dps, ±16 g | -40°C to +125°C | 0.8 mA combo | AN5987 |
| ISM330BX | Industrial | 128 nodes | ±4000 dps, ±8 g | -40°C to +85°C | 0.6 mA combo | AN6124 |
| ISM6HG256X | Industrial | 256 nodes | ±4000, ±256 g | -40°C to +105°C | 0.67 mA combo | AN6355 |
Biosensors with an embedded MLC
| Part number | Application | MLC | Input referred Noise | Input Impedance max | Supply Current | ODR max | Application note for MLC features |
| ST1VAFE3BX | Consumer | 128 nodes | 10 µV | 1000 MΩ | 48.1 µA | 3200 Hz | AN6208 |
| ST1VAFE6AX | Consumer | 128 nodes | 54 µV | 2400 MΩ | 205 µA | 240 Hz | AN6161 |
Other MEMS sensors with an embedded MLC
| Part number | Application | Family | MLC | Full scale | Temperature range | Power consumption | Application note for MLC features |
| LSM6DSOX | Consumer | Inertial measurement unit | 256 nodes | ±2000 dps, ±16 g | -40°C to +85°C | 0.55 mA combo | AN5259 |
| LSM6DSO32X | Consumer | Inertial measurement unit | 256 nodes | ± 2000 dps; ± 32 g | -40°C to +85°C | 0.55 mA combo | AN5656 |
| LSM6DSRX | Consumer | Inertial measurement unit | 512 nodes | ±4000 dps, ±16 g | -40°C to +85°C | 1.2 mA combo | AN5393 |
| ISM330DHCX | Industrial | Inertial measurement unit | 512 nodes | ±4000 dps, ±16 g | -40°C to +105°C | 1.2 mA combo | AN5392 |
| IIS2ICLX | Industrial | Accelerometer | 512 nodes | ±3 g | -40°C to +105°C | 0.42 mA | AN5536 |
| ASM330LHB | Automotive | Inertial measurement unit | 512 nodes | ±4000 dps, ±16 g | -40°C to +105°C | 0.8 mA combo | AN5915 |
| ASM330LHHX | Automotive | Inertial measurement unit | 512 nodes | ±4000 dps, ±16 g | -40°C to +105°C | 0.8 mA combo | AN5781 |
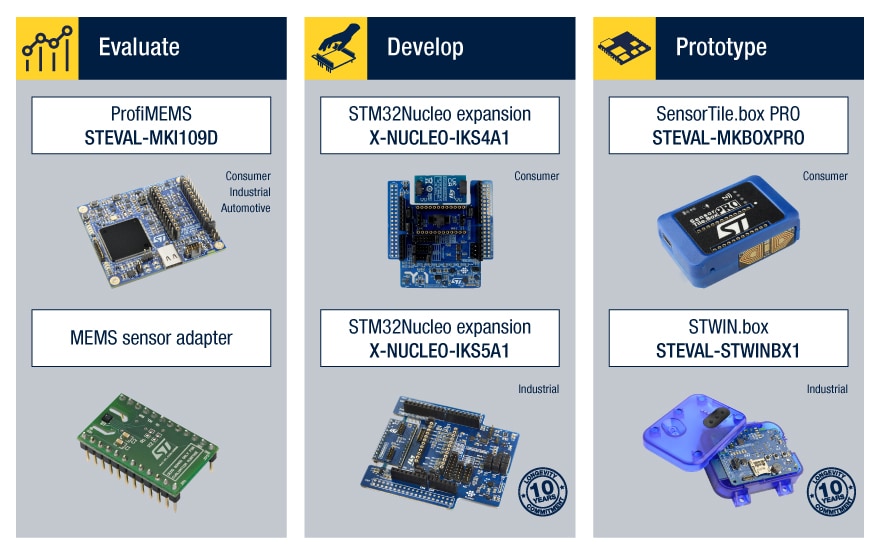
How to get started with sensors with an embedded MLC?
The best way to get started with machine learning core in sensors is to select the appropriate solution with supporting ST tools and software for your application.
ST MEMS sensors integrate a machine learning core (MLC) and often a finite state machine (FSM), using decision trees to improve motion detection accuracy and efficiency. This enables real-time, low-power recognition of complex motion patterns directly on the sensor, ideal for wearables, smartphones, and IoT applications.
Explore our GitHub repository to access practical examples and tutorials that help you unlock the full potential of the finite state machine features in ST MEMS sensors.
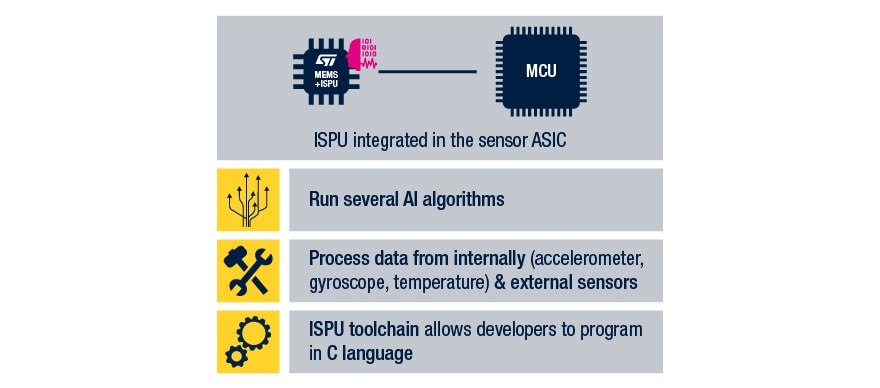
Sensors with an intelligent sensor processing unit (ISPU)

The ISPU is a true integrated digital signal processor (DSP) that is optimized with respect to a general-purpose MCU and can be used to run complex AI algorithms. Its advantage is that - being integrated - it optimizes the required computing power to the maximum.
Added value:
- Ultra-low power consumption at system level, thanks to optimized data transfer
- High-processing capability with AI-enabled programmable core (ML and NN)
- Easily programmable with C language or with commercial and open-source AI models
MEMS sensors embedding an intelligent sensor processing unit (ISPU)
| Part number | Application | Family | Memory | Full scale | Temperature range | Power consumption | Application notes for ISPU features |
| ISM330IS | Industrial | Inertial Measurement Unit | 10 MHz clock, RAM 40 KB | ± 2000 dps, ± 16 g | -40°C to +85°C | 0.59 mA (combo mode) | AN5850 |
| LSM6DSO16IS | Consumer | Inertial Measurement Unit | 10 MHz clock, RAM 40 KB | ± 2000 dps, ± 16 g | -40°C to +85°C | 0.59 mA (combo mode) | AN5799 |
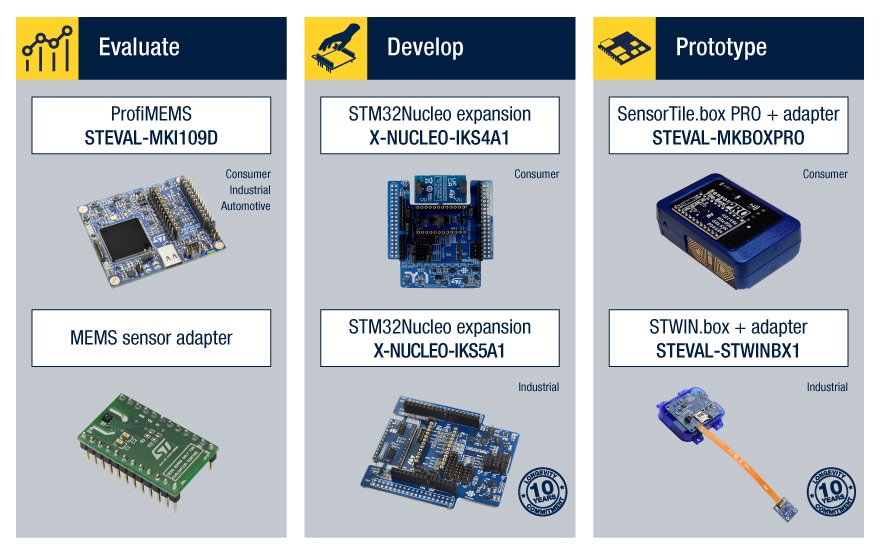
How to get started with sensors with an embedded ISPU?
How to program the ISPU?
There is an AI solution for every need using ISPU.
With MEMS Studio you can bring your own neural network model (built with Keras, TensorFlowLite, ONNX) into optimized C code for ISPU
ISPU-Toolchain (C complier)
We provide ISPU programming support with an ecosystem of libraries and third-party tools/IDEs to help you implement even the most complex AI models.
A command-line interface (CLI) tool to optimize and compile edge AI models for ST microcontrollers, microprocessors, and MEMS sensors.
Recommended resources
Ready-to-go application examples in GitHub for AI at the edge
In our GitHub repository you will find application examples both for MLC and ISPU, such as human activity recognition, head gestures, vibration monitoring for predictive maintenance and more. To get started quickly with each example, the README file provides detailed information.





Webinar | Target |
| Measure and protect! Introducing the LSM6DSV32X IMU | Machine learning core |
| A generational change in vibration sensing and motion tracking | Machine learning core |
| Deliver everyday practicality to your IoT market with edge AI | Intelligent sensor processing unit |
| Unlock the power of Edge AI with ST's intelligent sensors and ST AIoT Craft | Machine learning core |
| Enabling intelligent factories with AI-powered industrial sensors for Industry 5.0 | Machine learning core |
| MEMS sensors redefined: intelligent building blocks for industrial innovation | Machine learning core |
Video | Target |
| MEMS sensor with AI core (ISPU – intelligent sensor processing unit) | Intelligent sensor processing unit |
| Automatic filters and features selection for Machine Learning Core in MEMS Studio | Machine learning core |
| ISPU wand: where magic meets the world of sensing solutions | Intelligent sensor processing unit |
| Discover our most recent IMU with a dual-MEMS accelerometer inside! | Machine learning core |
| LSM6DSV320X: transforming motion tracking and real-world sensing applications | Machine learning core |
Whitepaper | Target |
| Intelligent Sensor Processing Unit integrates brains into sensors with AI in the Edge | Intelligent sensor processing unit |
| Sensors for AI-powered intelligent factories | Machine learning core |
| Gear up for an unmatched automotive experience with MEMS sensors | Machine learning core |
| High-g accelerometer meets the intelligent IMU: enhancing precision in dynamic environments | Machine learning core |
To stay in touch with us
Use the following opportunities to make sure you stay up to date with the latest information:
Join the MEMS and Sensors Community to learn about new releases, share insights or ask our team of experts your technical questions. Or subscribe to our MEMS and Sensors quarterly newsletter.